
 Micromotores
Micromotores


Este robot zumo mini fabricado por Pololu es un pequeño robot de alto rendimiento para competencia de mini sumo (10cmx10cm), integra acelerómetro, magnetometro y giróscopo para detectar choques, seis sensores de línea, un buzer y es compatible con arduino!
Por supuesto que no solo lo puedes usar para sumo, tambíen puedes usarlo como seguidor de linea o adicionar partes para controlarlo por ejemplo con un bluetooth, o foto resistencias para que siga luz!
Características:
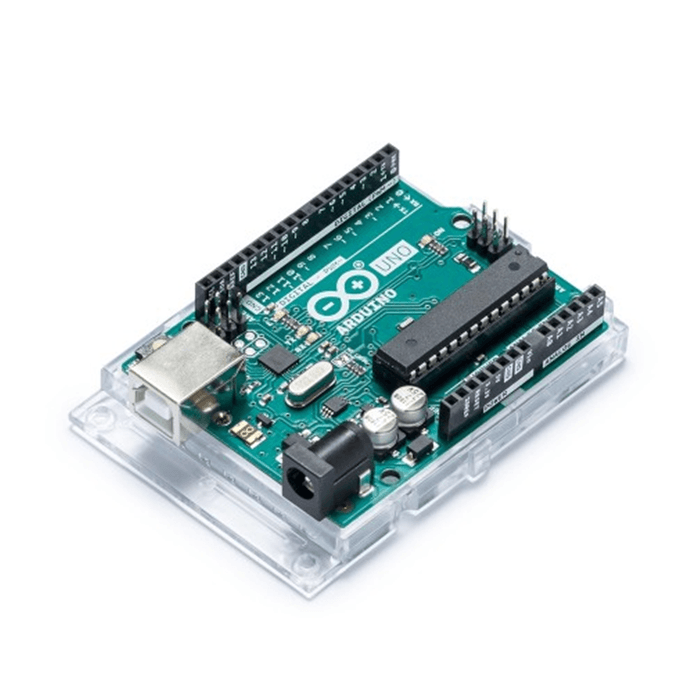
- Diseñado para ser usado con Arduino Uno
- 2 Motores 100:1 Hp
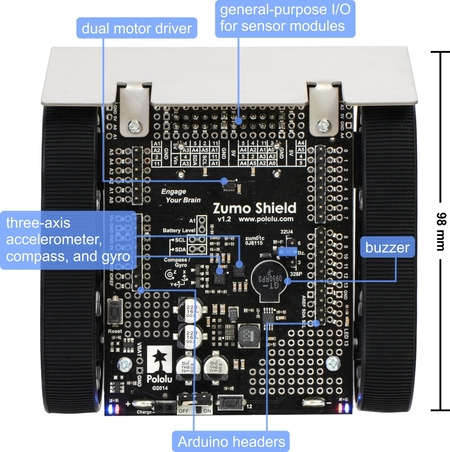
- Acelerómetro,magnetometro y giroscopio integrado
- Piezo buzzer integrado para generar sonidos
- El robot viene armado
- Seis sensores de línea integrados
- Locomoción basada en orugas para tener mayor tracción
- Funciona con 4 baterías AA
- Tamaño menor de 10cm x 10cm
- Peso aproximado 300 gramos con batería
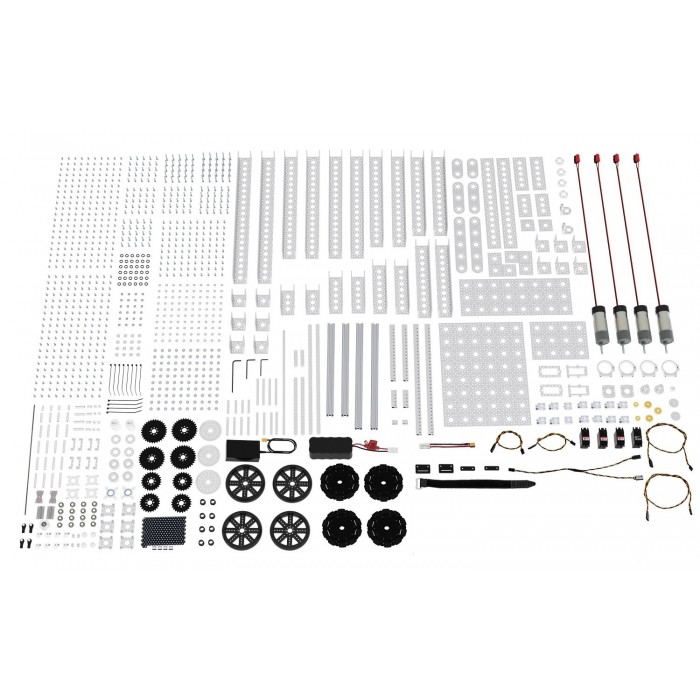
Este robot viene desarmado y falta board arduino y las baterías.
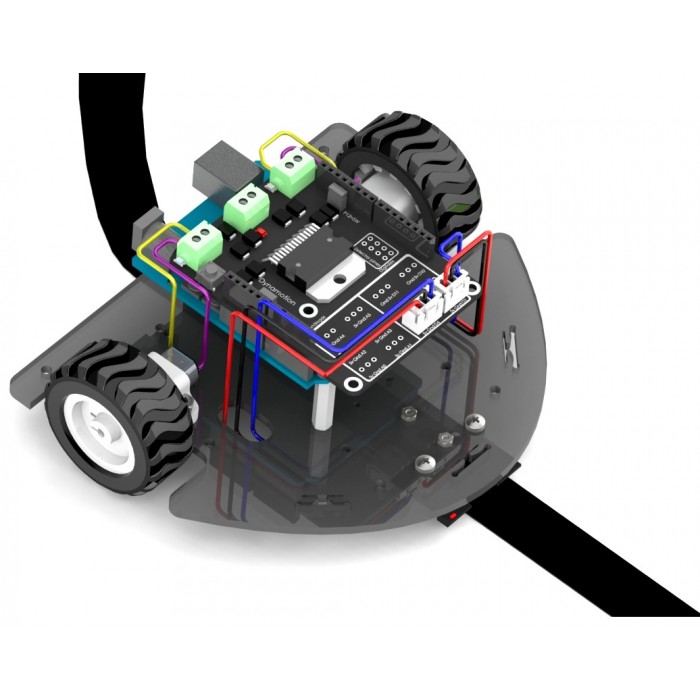
Partes del robot
Mira un ejemplo como seguidor de linea
Ejemplo de sumo
link de interés
- Web fabricante
-
- Zumo Shield for Arduino, v1.2 schematic diagram (449k pdf)
- Printable schematic diagram for the Pololu Zumo Shield for Arduino, v1.2
- Zumo Shield front expansion pinout (552k pdf)
- Texas Instruments DRV8835 motor driver datasheet (1MB pdf)
- LSM303D datasheet (1MB pdf)
- Datasheet for the ST LSM303D 3D accelerometer and 3D magnetometer module.
- L3GD20H datasheet (3MB pdf)
- Datasheet for the ST L3GD20H three-axis digital-output gyroscope.
- 3D model of the assembled Zumo Robot for Arduino (33MB step)
- This model uses simplified models of the control electronics to reduce the file size. More detailed models are available separately of the Zumo shield for arduino, v1.2 (13MB step) and Zumo reflectance sensor array (5MB step).
- Dimension diagram of the Zumo Shield for Arduino, v1.2 (467k pdf)
- 3D model of the Zumo Shield for Arduino, v1.2 (13MB step)
- Guide utilisateur du Robot Zumo Pololu (2MB pdf)
- Un guide complet pour assembler, utiliser et exploiter rapidement votre Robot Zumo (version 0.1). Note: This French translation of our Zumo Robot for Arduino user’s guide was made by our distributor MCHobby.
- Zumo Shield Libraries
- This collection of libraries and examples for the Arduino that make it easy to program an Arduino-controlled robot built with Pololu’s Zumo Shield or Zumo robot kit (also available fully assembled).
- LSM303 Arduino library
- This is a library for the Arduino that interfaces with our LSM303D, LSM303DLHC, and LSM303DLM 3D compass and accelerometer carriers as well as the compass and accelerometer ICs on the MinIMU-9 v3and AltIMU-10 v3 (it also works with older versions of those boards, some of which used the LSM303DLH and LSM303DLHC). It makes it simple to configure the device and read the raw accelerometer and magnetometer data, and it has a function for computing the tilt-compensated heading for those looking to use the LSM303 as a tilt-compensated compass.
- L3G Arduino library
- This is a library for the Arduino that interfaces with our L3GD20H and L3GD20 3-axis gyro carriers as well as the gyros on the MinIMU-9 v3 and AltIMU-10 v3 (it also works with older versions of those boards, some of which used the L3G4200D and the L3GD20). It makes it simple to configure the device and read the raw gyro data.
- Simulink Library for Zumo Robot
- This library can be used to program an Arduino-controlled Zumo through MATLAB and Simulink. It provides driver blocks for all the sensors present on the Zumo Robot as well as example models showing their usage.
- How to program a Zumo robot with Simulink
- This tutorial on the Adafruit Learning System guides you through the process of programming a Zumo robot with Simulink.
- Pixy Pet Robot tutorial: adding color vision to the Zumo Robot for Arduino with a Pixy CMUCam-5
- This tutorial from Adafruit shows how to pair a Pixy CMUCam-5 vision system with the Zumo Robot for Arduino to enable it to chase objects or follow you around.
- Zumo robot tuning tips
- This article was written by Professor Erich Styger for his class on embedded systems programming at the Lucerne University of Applied Sciences and Arts. It describes various ways to tweak the performance of a Zumo to be more competitive in a Mini Sumo competition. Note that his Zumos use a custom PCB rather than our Zumo shield for Arduino; our shield has a lot of capacitance in parallel with the batteries that generally prevents the “battery inertia” problem Erich describes.
- Using the L3GD20 gyroscope in control systems
- This is a YouTube playlist by control systems lecturer Brian Douglas that uses the L3GD20 MEMS gyroscope. It describes the fundamentals of the gyro and how to use it for closed and open loop control projects with MATLAB/Simulink and Arduino.
- Freedom Zumo Robot
- This robot is uses our Zumo robot kit, 75:1 micro metal gearmotors, and a Zumo reflectance sensor array. Instead of an Arduino it uses a Freescale FRDM-KL25Z as the microcontroller board, and sample code is available for line following and maze solving. By Erich, March 2013.





















Valoraciones
No hay valoraciones aún.